
Drone Feedback Controller
Adaptive Q-learning reinforcement learning agent with a nested PID actuation layer for UAV position stabilisation and waypoint navigation.
Key Features
Core technologies and system features.
Q-Learning Adaptation
Online tabular RL agent that selects optimal PID gains based on real-time flight states.
Nested PID Control
High-frequency PID actuation layer (1000Hz) for precise velocity and attitude tracking.
Wind Disturbance Handling
Adaptive integral clamping and gain scheduling specifically tuned for robust performance in windy environments.
Experience Replay
Stabilizes learning using a 400-sample circular buffer for off-policy TD(0) updates.
Source
Explore the primary logical modules.
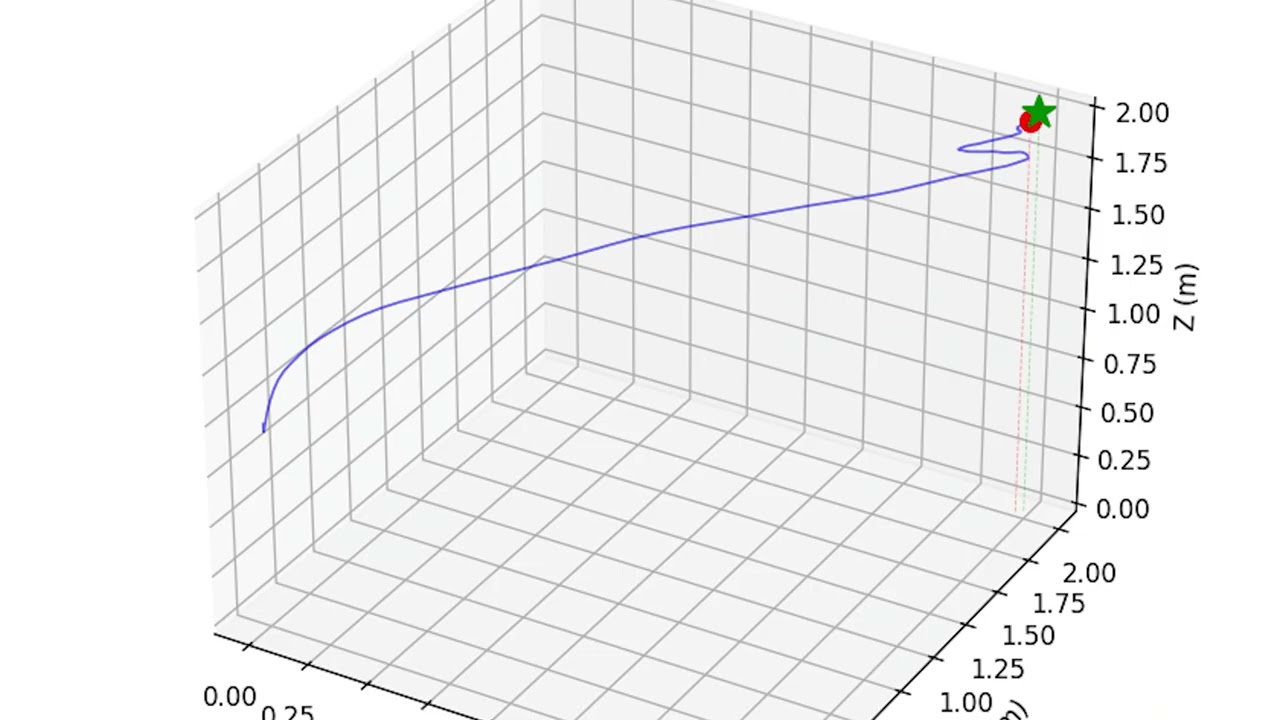
1def controller(state, target_pos, dt, wind_enabled=False):2 # State: (dist, yaw_err, wind) -> 96 discrete states3 # Actions: Selected from 16 pre-tuned PID action profiles4 5 # Q-learning TD(0) Update6 reward = (prev_cost - current_cost) - 0.015 * effort7 Q[s][a] += alpha * (reward + gamma + max(Q[s_next]) - Q[s][a])8 9 # PID Law10 vx = kp * ex + ki * integral_x + kd * derivative_x11 return (vx, vy, vz, yaw_rate)Adaptive RL Control Simulation
Real-time Q-learning simulation with PID gain scheduling.
Project Walkthroughs
Click any video to play.
 3:15
3:15Drone Week-1 trail
Initial drone feedback control session and flight testing.
 Live
LiveDrone Week-2 trail
UAV adaptive trajectory tracking and simulation demonstration.
 Live
LiveDrone Week-3 trail
Trajectory tracking and stabilization testing during week 3.
 Live
LiveTechnical Evaluvation
UAV adaptive position stabilisation and robust waypoint tracking tests.
GitHub
GitHub repositories for this project.
Drone Feedback Controller Repository
Access the complete source code on GitHub.