
Autonomous Robot
Self-navigating robot using SLAM and path planning algorithms with real-time obstacle detection
Key Features
Interactive 3D structural breakdown of the LEO Rover.
SLAM
Simultaneous Localization and Mapping utilizing 2D/3D LiDAR fusion to construct high-fidelity spatial maps of unknown environments in real-time.
Autonomous Navigation
Dynamic path planning and robust obstacle avoidance algorithms ensuring seamless point-to-point traversal across complex terrain.
Computer Vision
Edge-deployed YOLOv8 inference enabling rapid object detection, semantic segmentation, and advanced environmental perception.
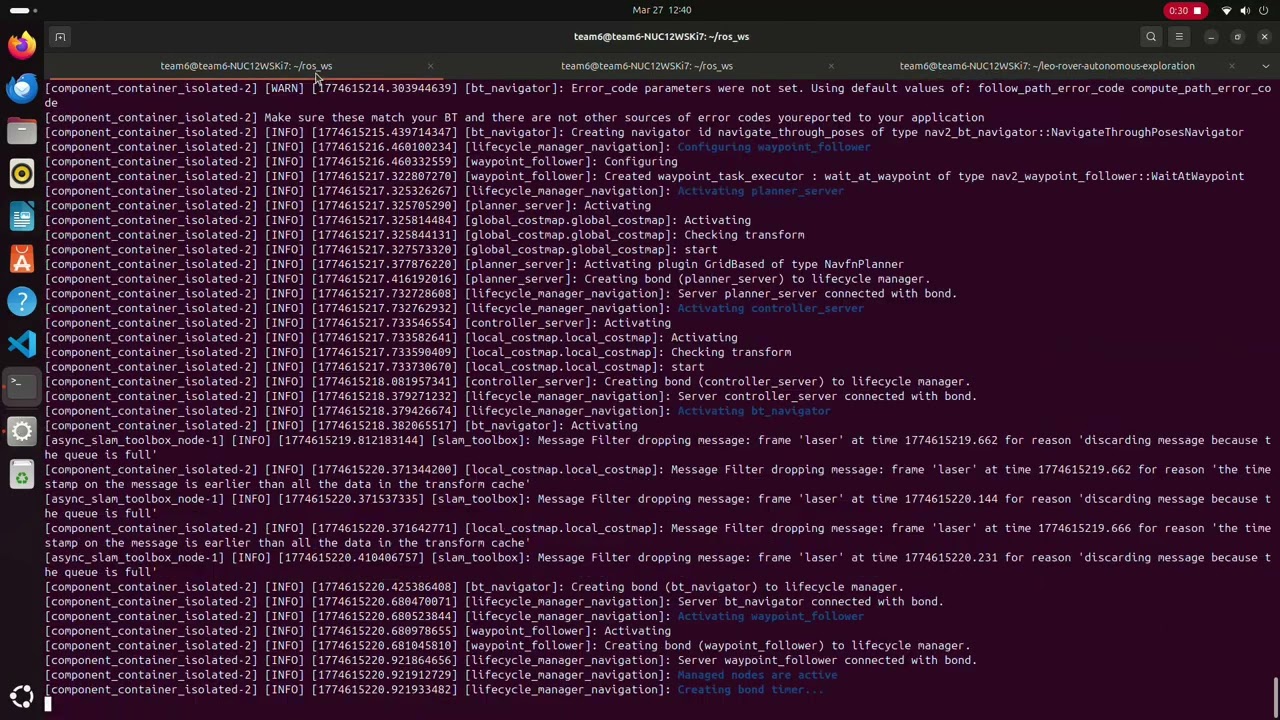
ROS2 Architecture
A decentralized, highly modular communication framework managing sensor data streams and autonomous state machines continuously.
Path Logging
Comprehensive telemetry recording system tracking odometry, executed paths, and obstacle metadata for post-mission kinematic analysis.
Product Showcase
Deep dive into the specialized hardware components used in our mobile autonomous systems.


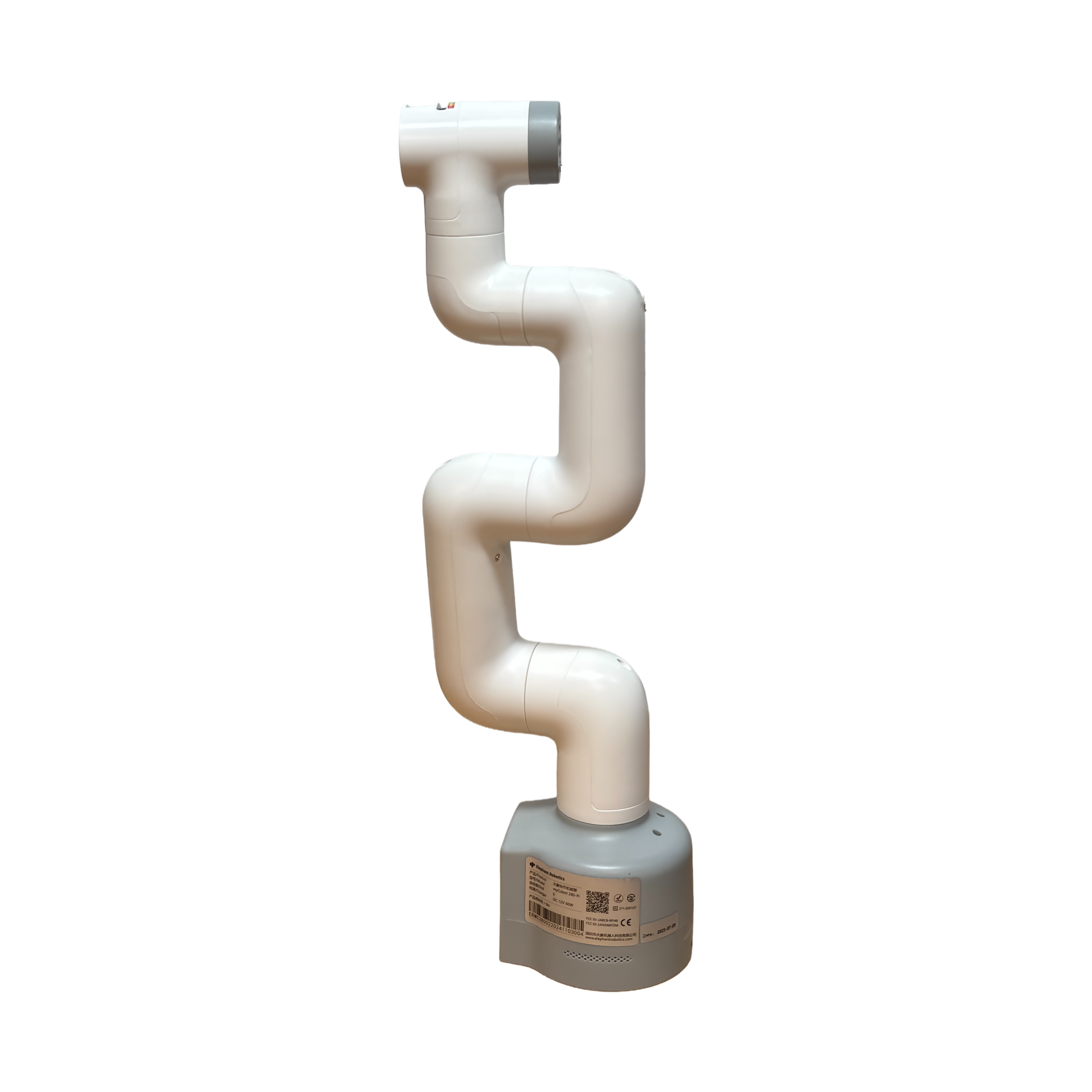


Hardware Module
RPLidar Sensor
A high-performance 360-degree laser range scanner. Provides the robot with precise spatial awareness and real-time mapping capabilities.
Design Files & CAD
Models, schematics, and assets.
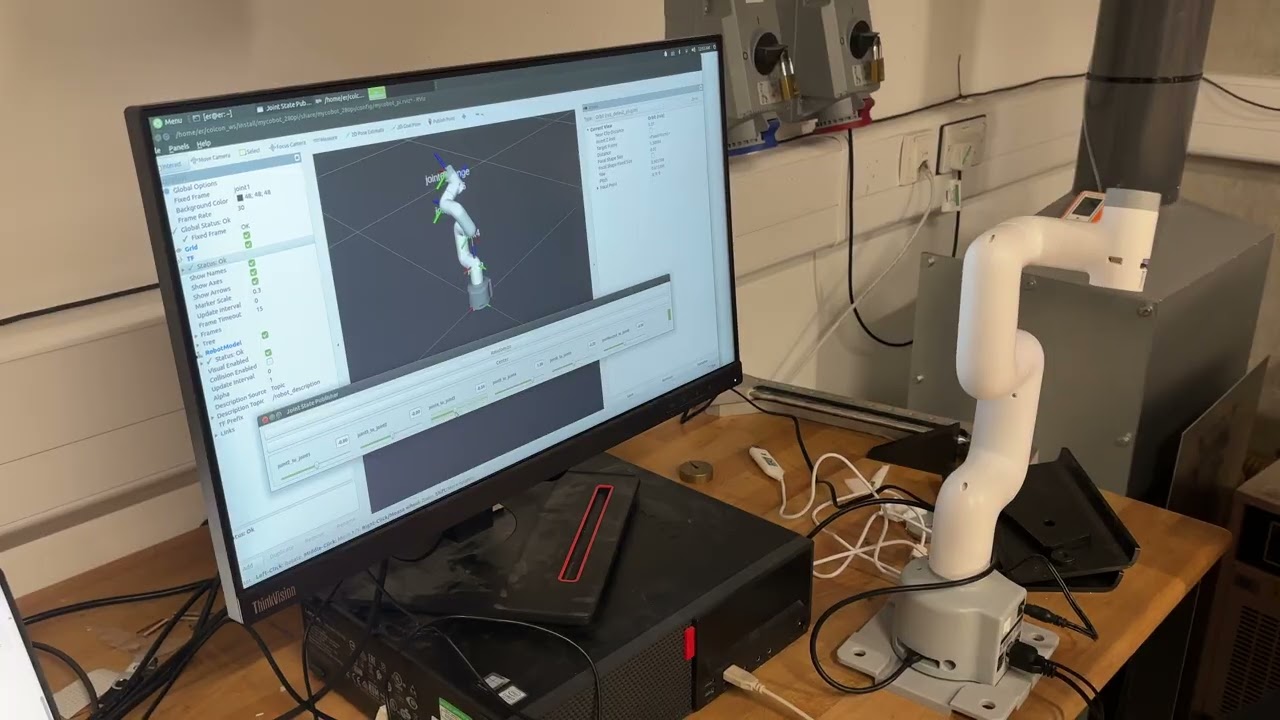
Autonomous Mobile Robot Assembly
Source Code
Explore the primary logical modules.
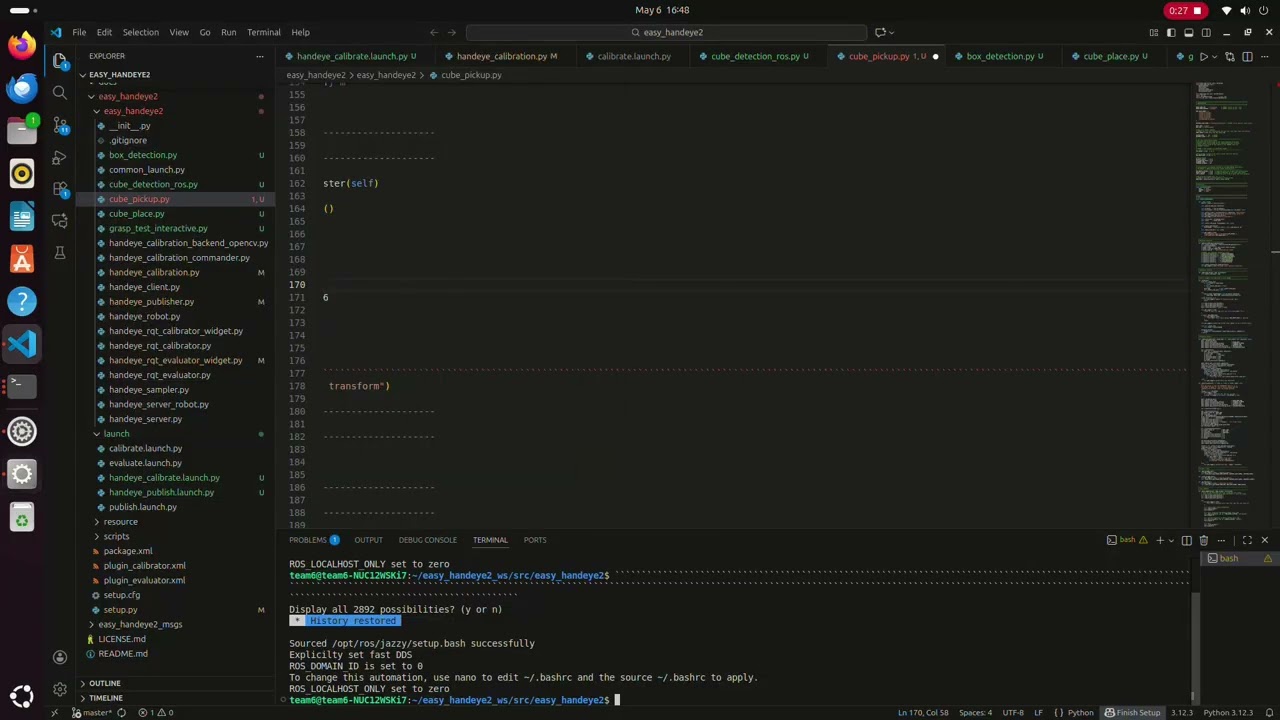
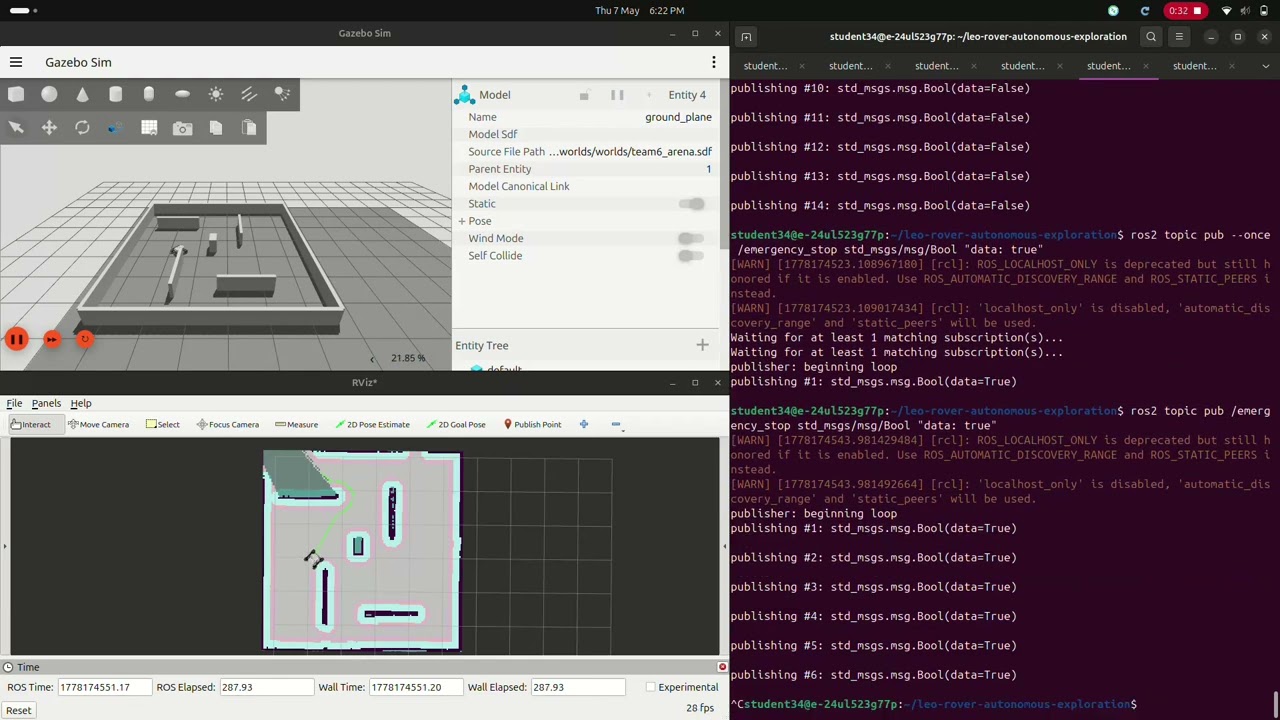
1import rclpy2 from rclpy.node import Node3 from sensor_msgs.msg import Image4 from cv_bridge importCvBridge5 import cv26 from ultralytics import YOLO7 from vision_msgs.msg import Detection2DArray8 9 class YoloV8Node(Node):10 def __init__(self):11 super().__init__('yolov8_node')12 self.bridge = CvBridge()13 self.model = YOLO('yolov8n.pt') # Load YOLOv8 Nano14 15 # Subscribe to camera16 self.subscription = self.create_subscription(17 Image, '/camera/image_raw', self.image_callback, 10)18 19 # Publisher for detections20 self.detection_pub = self.create_publisher(21 Detection2DArray, '/detections', 10)22 23 self.get_logger().info("YOLOv8 Node Initialized.")24 25 def image_callback(self, msg):26 try:27 cv_image = self.bridge.imgmsg_to_cv2(msg, "bgr8")28 results = self.model(cv_image)29 30 for r in results:31 for box in r.boxes:32 conf = box.conf[0]33 if conf > 0.5:34 self.get_logger().info(f"Detected class {box.cls} - Conf {conf:.2f}")35 36 except Exception as e:37 self.get_logger().error(f"Failed to process image: {e}")38 39 def main(args=None):40 rclpy.init(args=args)41 node = YoloV8Node()42 rclpy.spin(node)43 node.destroy_node()44 rclpy.shutdown()45 46 if __name__ == '__main__':47 main()Live Simulation Output
Simulated console execution.
Project Walkthroughs
Click any video to play.
 Live
LivePerception System (Rover's PoV)
Object detection and LIDAR perception capabilities from the Rover's point of view.
 3:48
3:48Arm Movement Testing
Testing the movement of the arm.
 5:20
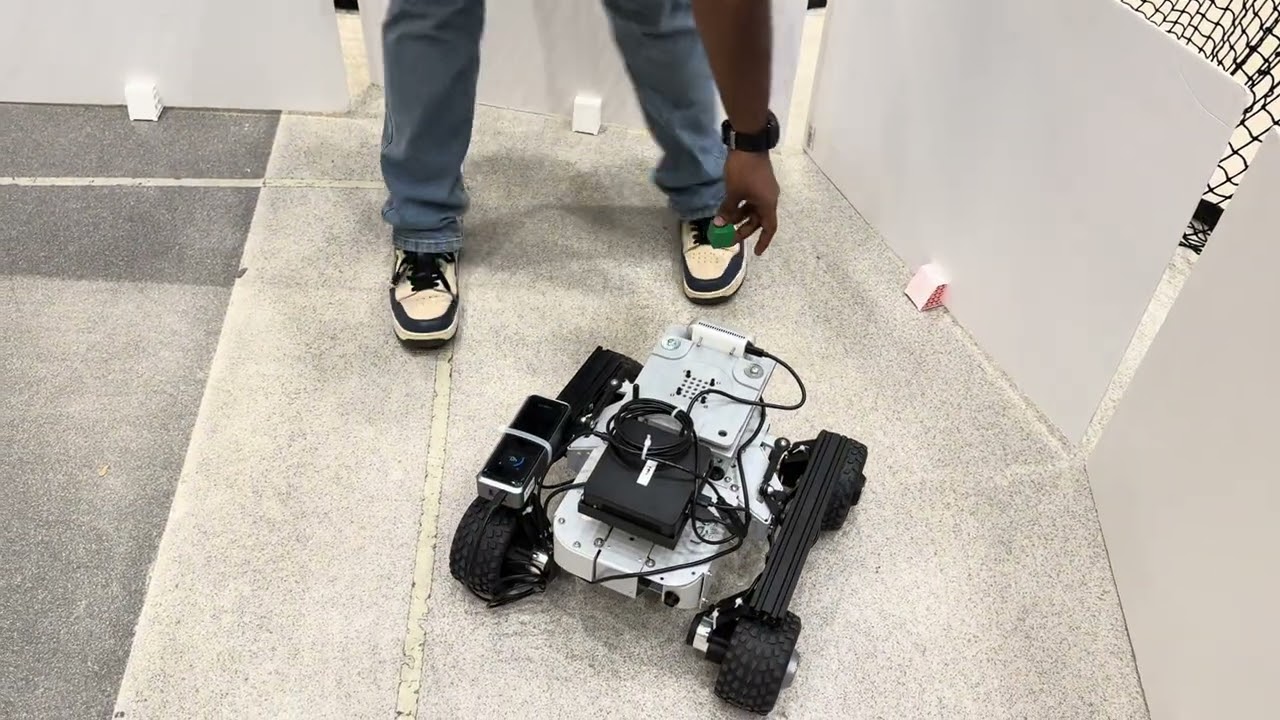
5:20Structural Construction
The construction of the robot.
 7:15
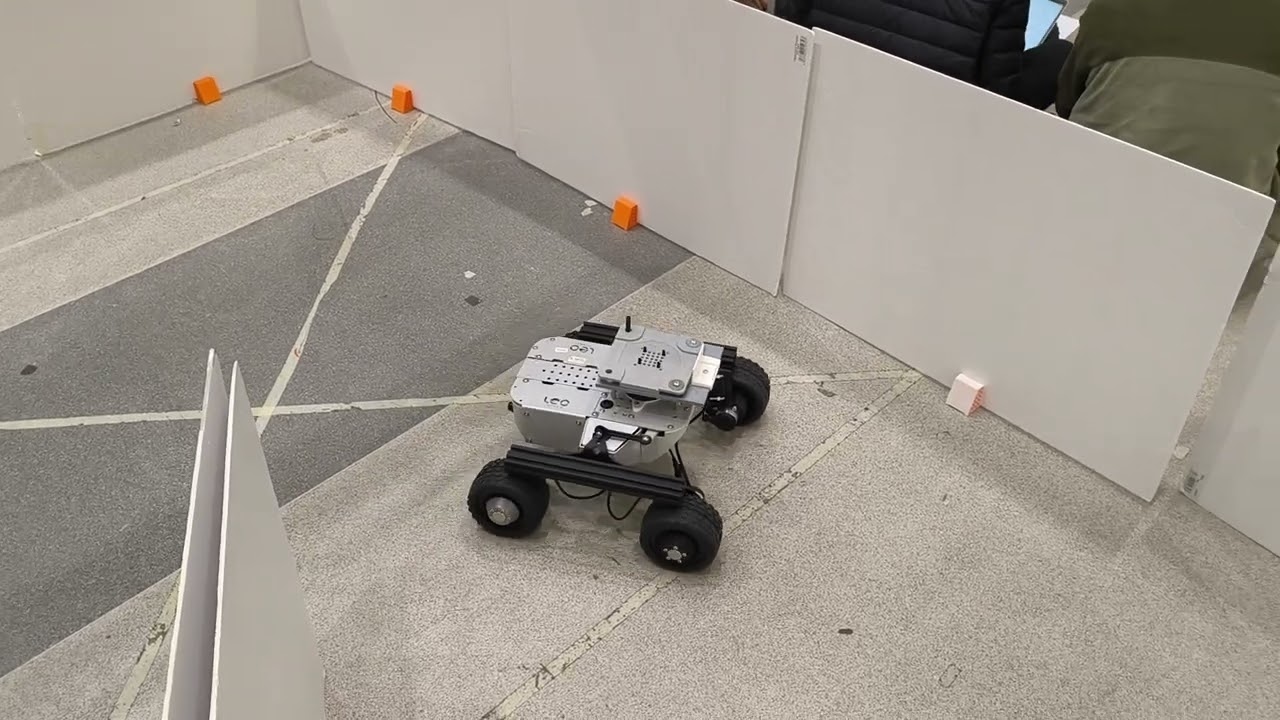
7:15Trail Run
First run of the robot in a trail environment.
 1:45
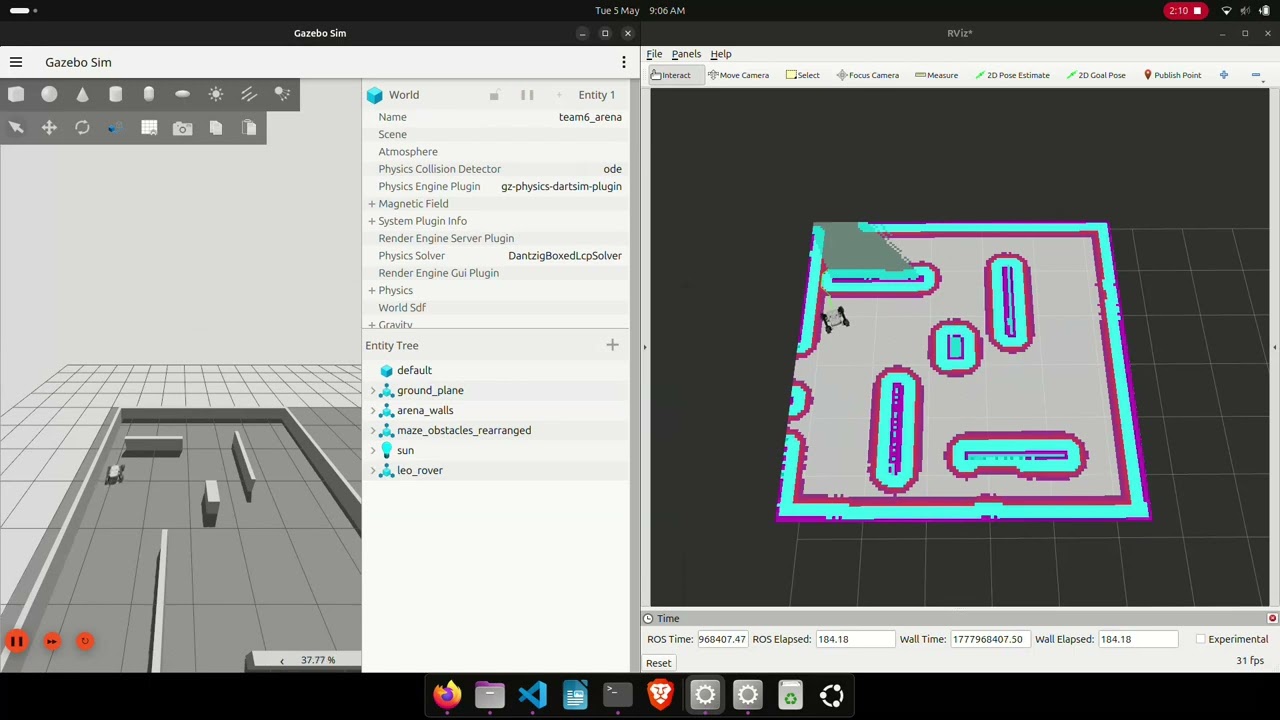
1:45Navigation Simulation
Autonomous Mobile Robot navigation simulation in a controlled environment.
 2:15
2:15Autonomous Navigation
Autonomous Mobile Robot navigation simulation - Alternative scenario.
 1:20
1:20Navigation toward to block
Autonomous Mobile Robot navigation toward a specific block.
 Live
LiveReturn to intial position after mission (Simulation Demo)
Simulation of the robot's navigation path.
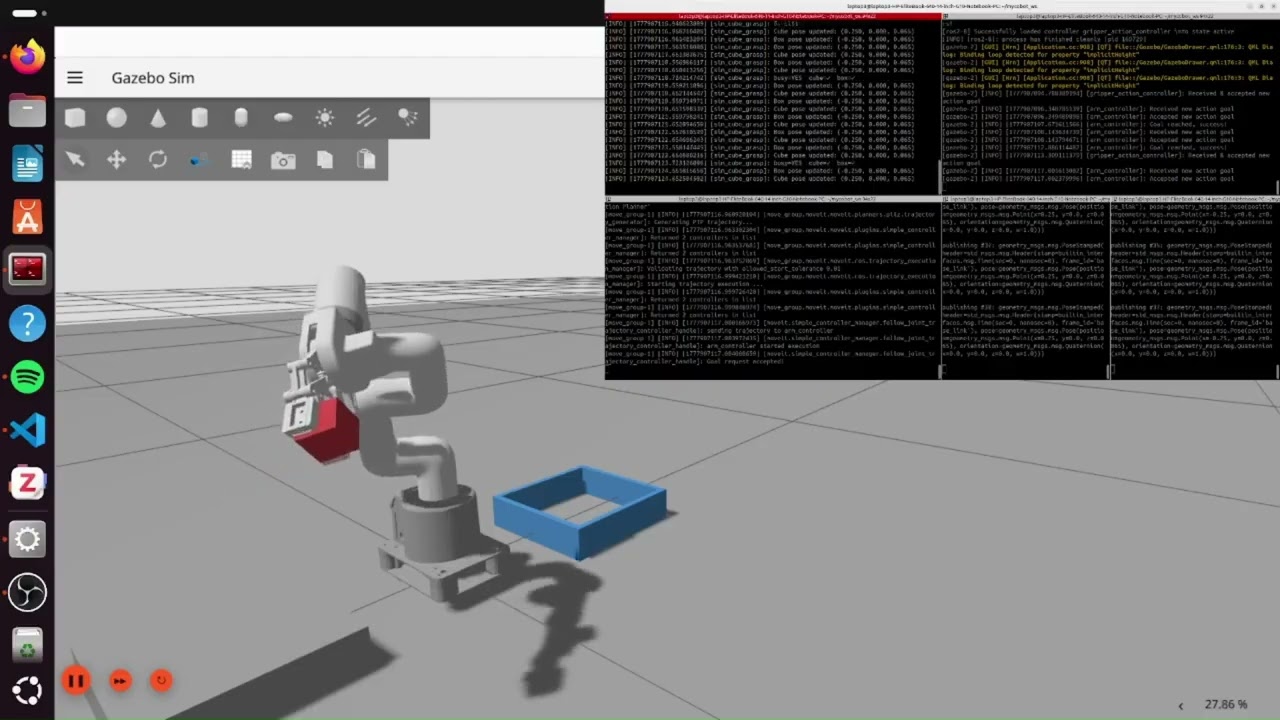 Live
LiveArm Manipulation (Simulation)
Simulation of the robot's arm manipulation.
 Live
LiveEmergency brake (Simulation)
Demonstration of the robot's safety features and protocols.
 Live
LiveFinal Evaluation
Testing the integrated SLAM, path planning, and YOLOv8 object detection systems during an autonomous run.
Get code
GitHub repositories for this project.
Autonomous Robot Repository
Access the complete source code on GitHub.
Team
The dedicated team of engineers and innovators behind the Autonomous Robot project.





Computer Vision and Navigation
Designing , 3D printing the components and Hand-Eye Calibration
Navigation and SLAM
Navigation and spatial awareness
SLAM and spatial awareness